


上一篇文章介绍的是如何用pytorch进行一些基础网络模型的训练。在这一章,会介绍网络模型训练的套路、保存与读取、以及一些注意事项。
网络模型的保存与读取
在神经网络训练过程中,可以根据轮数/loss值来绘图,若在中间的某一轮出现了loss值最低,可以将该轮的模型暂时保存下。
保存&读取方式一:包含网络结构以及模型参数的保存
import torchvision
import torch
vgg16 = torchvision.models.vgg16(pretrained=False)
torch.save(vgg16,"./model/vgg16_method1.pth") # 保存方式一:模型结构 + 模型参数
print(vgg16)
import torch
model = torch.load("./model/vgg16_method1.pth") # 保存方式一对应的加载模型
print(model)
这种方法将网络的参数以及模型结构一并保留下来,因此文件大小会比较大
保存&读取方式二:不包含网络结构的保存
import torchvision
import torch
vgg16 = torchvision.models.vgg16(pretrained=False)
torch.save(vgg16.state_dict(),"./model/vgg16_method2.pth") # 保存方式二:模型参数(官方推荐),不再保存网络模型结构
print(vgg16)
这种方式相当于把网络的参数保留在字典里。
import torch
import torchvision
model = torch.load("./model/vgg16_method2.pth") # 导入模型参数
print(model)
打印出来可以看到是字典的形式,那怎么导入到模型里呢?
import torch
import torchvision
vgg16 = torchvision.models.vgg16(pretrained=False)
print(vgg16)
vgg16.load_state_dict(torch.load("./model/vgg16_method2.pth")) # 将模型参数导入到模型结构中
print(vgg16)
这时候打印出来就是网络结构而不是字典了。
神经网络的训练模版
其实在上一篇文章学习各种结构的训练后也能差不多总结出套路了。在这一小节,会用CIFAR10数据集训练的多分类模型来总结一下所有的代码模版。
import torchvision
import torch
from torch import nn
from torch.utils.data import DataLoader
from torch.utils.tensorboard import SummaryWriter
# from model import * 相当于把 model中的所有内容写到这里,这里直接把model结构写在这个py文件里了,所以不需要这行
# 定义训练的设备,是否可以用GPU
# device = torch.device("cpu")
# device = torch.device("cuda") # 使用 GPU 方式一
# device = torch.device("cuda:0") # 使用 GPU 方式二
device = torch.device("cuda" if torch.cuda.is_available() else "cpu")
'''
第一步:加载数据集
'''
train_data = torchvision.datasets.CIFAR10("../dataset/CIFAR10", train=True, transform=torchvision.transforms.ToTensor(),
download=True)
test_data = torchvision.datasets.CIFAR10("../dataset/CIFAR10", train=False, transform=torchvision.transforms.ToTensor(),
download=True)
# 看看训练集和测试集的长度
train_data_size = len(train_data)
test_data_size = len(test_data)
print("训练数据集的长度:{}".format(train_data_size)) # format的用法是把括号内参数值填写到前面{}的位置上
print("测试数据集的长度:{}".format(test_data_size))
# 利用 Dataloader 来加载数据集
train_dataloader = DataLoader(train_data, batch_size=64)
test_dataloader = DataLoader(test_data, batch_size=64)
'''
第二步:定义网络模型
'''
class Net(nn.Module):
def __init__(self):
super(Net, self).__init__()
self.model1 = nn.Sequential(
nn.Conv2d(3, 32, 5, 1, 2), # 输入通道3,输出通道32,卷积核尺寸5×5,步长1,填充2
nn.MaxPool2d(2),
nn.Conv2d(32, 32, 5, 1, 2),
nn.MaxPool2d(2),
nn.Conv2d(32, 64, 5, 1, 2),
nn.MaxPool2d(2),
nn.Flatten(), # 展平后变成 64*4*4 了
nn.Linear(64 * 4 * 4, 64),
nn.Linear(64, 10)
)
def forward(self, x):
x = self.model1(x)
return x
# 创建网络模型
model = Net()
model = model.to(device) # 也可以不赋值,直接 model.to(device)
'''
第三步:构造loss和优化器
'''
loss_fn = nn.CrossEntropyLoss() # 交叉熵,fn 是 fuction 的缩写
loss_fn = loss_fn.to(device) # 也可以不赋值,直接loss_fn.to(device)
learning = 1e-2 # 1e-2 就是 0.01 的意思
optimizer = torch.optim.SGD(model.parameters(), lr=learning) # 随机梯度下降优化器
# 设置网络的一些参数
# 记录训练的次数
total_train_step = 0
# 记录测试的次数
total_test_step = 0
'''
第四步:训练
'''
# 训练的轮次
epoch = 10
# 添加 tensorboard可视化
writer = SummaryWriter("logs")
for i in range(epoch):
print("-----第 {} 轮训练开始-----".format(i + 1))
# 训练步骤开始
# model.train() # 当网络中有dropout层、batchnorm层时,训练前需要这行代码
for data in train_dataloader:
imgs, targets = data
imgs = imgs.to(device) # 也可以不赋值,直接 imgs.to(device)
targets = targets.to(device) # 也可以不赋值,直接 targets.to(device)
outputs = model(imgs)
loss = loss_fn(outputs, targets)
# 优化器对模型调优
optimizer.zero_grad() # 梯度清零
loss.backward() # 反向传播,计算损失函数的梯度
optimizer.step() # 根据梯度,对网络的参数进行调优
total_train_step = total_train_step + 1
if total_train_step % 100 == 0: # 每隔100轮打印一次训练步数&loss值,并写进tensorboard里
print("训练次数:{},Loss:{}".format(total_train_step, loss.item()))
writer.add_scalar("train_loss", loss.item(), total_train_step)
# 测试步骤开始(每一轮训练后都查看在测试数据集上的loss情况)
# model.eval() # 当网络中有dropout层、batchnorm层时,测试前需要这行代码
total_test_loss = 0
total_accuracy = 0
with torch.no_grad(): # 测试过程不需要计算梯度,可以节省显卡算力和内存
for data in test_dataloader: # 测试数据集提取数据
imgs, targets = data
imgs = imgs.to(device) # 也可以不赋值,直接 imgs.to(device)
targets = targets.to(device) # 也可以不赋值,直接 targets.to(device)
outputs = model(imgs)
loss = loss_fn(outputs, targets) # 仅data数据在网络模型上的损失
total_test_loss = total_test_loss + loss.item() # 所有loss
accuracy = (outputs.argmax(1) == targets).sum()
# outputs第0维度是标签,第1维度是为该对应标签的概率,因此argmax(1)返回的是第1维度最大值的下标,也就是预测出的类别。然后再看和真实类别比对后一共预测对了几个sum()
total_accuracy = total_accuracy + accuracy # 把预测正确的数量加起来
print("整体测试集上的Loss:{}".format(total_test_loss))
print("整体测试集上的正确率:{}".format(total_accuracy / test_data_size)) # 除以总数,变成正确率
writer.add_scalar("test_loss", total_test_loss, total_test_step)
writer.add_scalar("test_accuracy", total_accuracy / test_data_size, total_test_step)
total_test_step = total_test_step + 1
torch.save(model, "./model/model_{}.pth".format(i)) # 保存每一轮训练后的结果,用的是第一种保存方式
print("模型已保存")
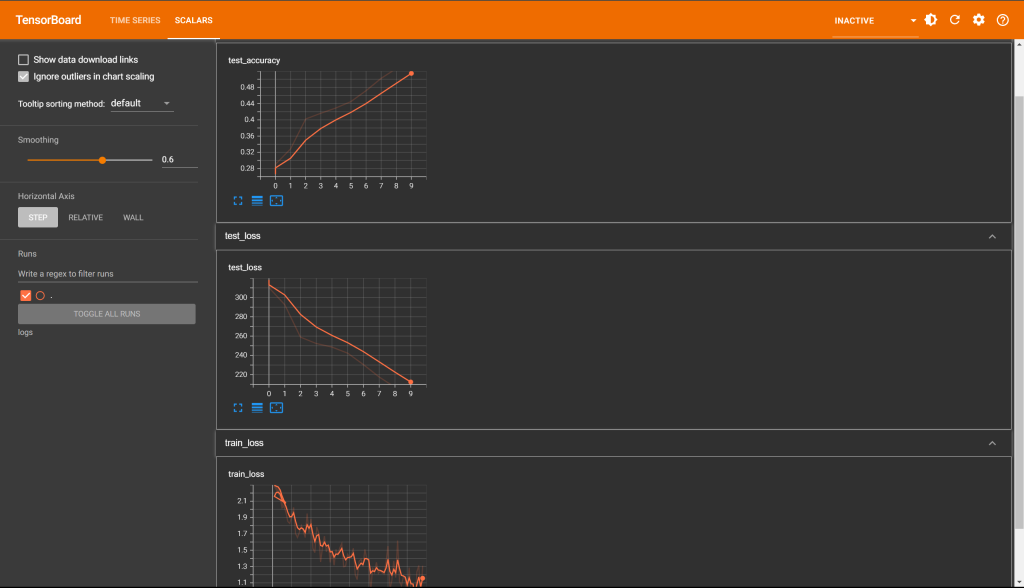
writer.close() # 记得关tensorboard
然后在终端输入 tensorboard –logdir=logs,进入可视化界面
需要注意的是:
① model.train()和model.eval()的区别主要在于Batch Normalization和Dropout两层。
② 如果模型中有BN层(Batch Normalization)和 Dropout,需要在训练时添加model.train()。model.train()是保证BN层能够用到每一批数据的均值和方差。对于Dropout,model.train()是随机取一部分网络连接来训练更新参数。
③ 不启用 Batch Normalization 和 Dropout。 如果模型中有BN层(Batch Normalization)和Dropout,在测试时添加model.eval()。model.eval()是保证BN层能够用全部训练数据的均值和方差,即测试过程中要保证BN层的均值和方差不变。对于Dropout,model.eval()是利用到了所有网络连接,即不进行随机舍弃神经元。
④ 训练完train样本后,生成的模型model要用来测试样本。在model(test)之前,需要加上model.eval(),否则的话,有输入数据,即使不训练,它也会改变权值。这是model中含有BN层和Dropout所带来的的性质。
⑤ 在做one classification的时候,训练集和测试集的样本分布是不一样的,尤其需要注意这一点。
GPU的使用在12, 57, 65, 93, 94,115,116行体现。
神经网络的验证模版
测试,就是运用已经训练好的模型。以上面那个多分类问题为例:
import torchvision
from PIL import Image
from torch import nn
import torch
image_path = "image/plane.png"
image = Image.open(image_path) # PIL类型的Image
image = image.convert("RGB")
# 这里是因为,png格式的图片是四通道,除了RGB三通道还有一个透明通道,所以要用这行代码适应各种png、jpg格式的图片
print(image)
transform = torchvision.transforms.Compose([torchvision.transforms.Resize((32, 32)),
torchvision.transforms.ToTensor()]) # 图像处理,reshape成32×32的大小,并将PIL格式转成tensor格式
image = transform(image)
print(image.shape)
# 记得把模型结构加载过来,但是不用model = Net()创造模型
class Net(nn.Module):
def __init__(self):
super(Net, self).__init__()
self.model1 = nn.Sequential(
nn.Conv2d(3, 32, 5, 1, 2),
nn.MaxPool2d(2),
nn.Conv2d(32, 32, 5, 1, 2),
nn.MaxPool2d(2),
nn.Conv2d(32, 64, 5, 1, 2),
nn.MaxPool2d(2),
nn.Flatten(),
nn.Linear(64 * 4 * 4, 64),
nn.Linear(64, 10)
)
def forward(self, x):
x = self.model1(x)
return x
# 注意:在GPU上训练保存的,测试的时候要加一句map_lacation=torch.device('cpu')将模型转到cpu上
model = torch.load("./model/model_9.pth", map_location=torch.device('cpu'))
print(model)
image = torch.reshape(image, (1, 3, 32, 32)) # 转为四维,符合网络输入需求
model.eval()
with torch.no_grad(): # 不进行梯度计算,减少内存计算
output = model(image)
output = model(image)
print(output)
print(output.argmax(1)) # 概率最大类别的输出
<PIL.Image.Image image mode=RGB size=1216×762 at 0x207FD4BBA00>
torch.Size([3, 32, 32])
Net(
(model1): Sequential(
(0): Conv2d(3, 32, kernel_size=(5, 5), stride=(1, 1), padding=(2, 2))
(1): MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False)
(2): Conv2d(32, 32, kernel_size=(5, 5), stride=(1, 1), padding=(2, 2))
(3): MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False)
(4): Conv2d(32, 64, kernel_size=(5, 5), stride=(1, 1), padding=(2, 2))
(5): MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False)
(6): Flatten(start_dim=1, end_dim=-1)
(7): Linear(in_features=1024, out_features=64, bias=True)
(8): Linear(in_features=64, out_features=10, bias=True)
)
)
tensor([[ 5.6072, 1.7308, 1.1605, -0.5726, 2.0951, -1.5238, -5.9656, 2.9409,
-1.5967, 0.6404]], grad_fn=<AddmmBackward0>)
tensor([0])
我们将一张飞机图片放在image文件夹里,然后让它预测,预测的结果是第0类,也就是飞机。
Comments NOTHING